Kush Garg
I’m a Mathematics and Computing undergraduate at Delhi Technological University (DTU), working in applied robotics. I’ve interned at MIT Media Lab with Prof. Akshat Dave on non-line-of-sight perception, and with my team UAS-DTU, placed runner-up at DARPA Triage Challenge 2024 (USA) and at ICUAS in Greece.
My technical work spans SLAM, Sensor Fusion, Autonomous Navigation & Path Planning, Deep Learning (GANs, LaMa), Physics Simulation, and UAV Systems & Avionics.
I enjoy building and deploying products, robots, and drones, taking ideas from concept to real-world systems. Outside of work, you’ll usually find me flying drones or playing table tennis.

News
- 03/2026 Scaled RenderPerk to six-figure revenue.
- 01/2026 Founded RenderPerk, a distributed compute rendering platform.
- 06/2025 Joined MIT Media Lab as a Research Intern.
- 05/2025 Paper accepted at ICUAS 2025 in Charlotte, NC.
- 10/2024 Won 2nd Place ($60,000) at the DARPA Triage Challenge with Team UAS-DTU.
- 05/2024 Secured 3rd Position globally at the ICUAS UAV Competition in Greece.
- 10/2024 Obtained FAA Part 107 S-UAS Pilot License.
Experience
Founder & CEO, RenderPerk
More Info
- GPU rendering platform built on top of distributed compute with near-unlimited scale.
- Render massive scenes across hundreds of GPUs globally in parallel
- Up to 80% lower cost and 10x faster than traditional render farms.
- Used by VFX/Animation studios and artists worldwide.
Research Intern, MIT Media Lab
More Info
- Developed SuperEx that enables robots to see beyond line-of-sight using SPAD-based NLOS sensing.
- Modeled a CUDA-accelerated real-time physics simulator for 360 multi-bounce photon scattering.
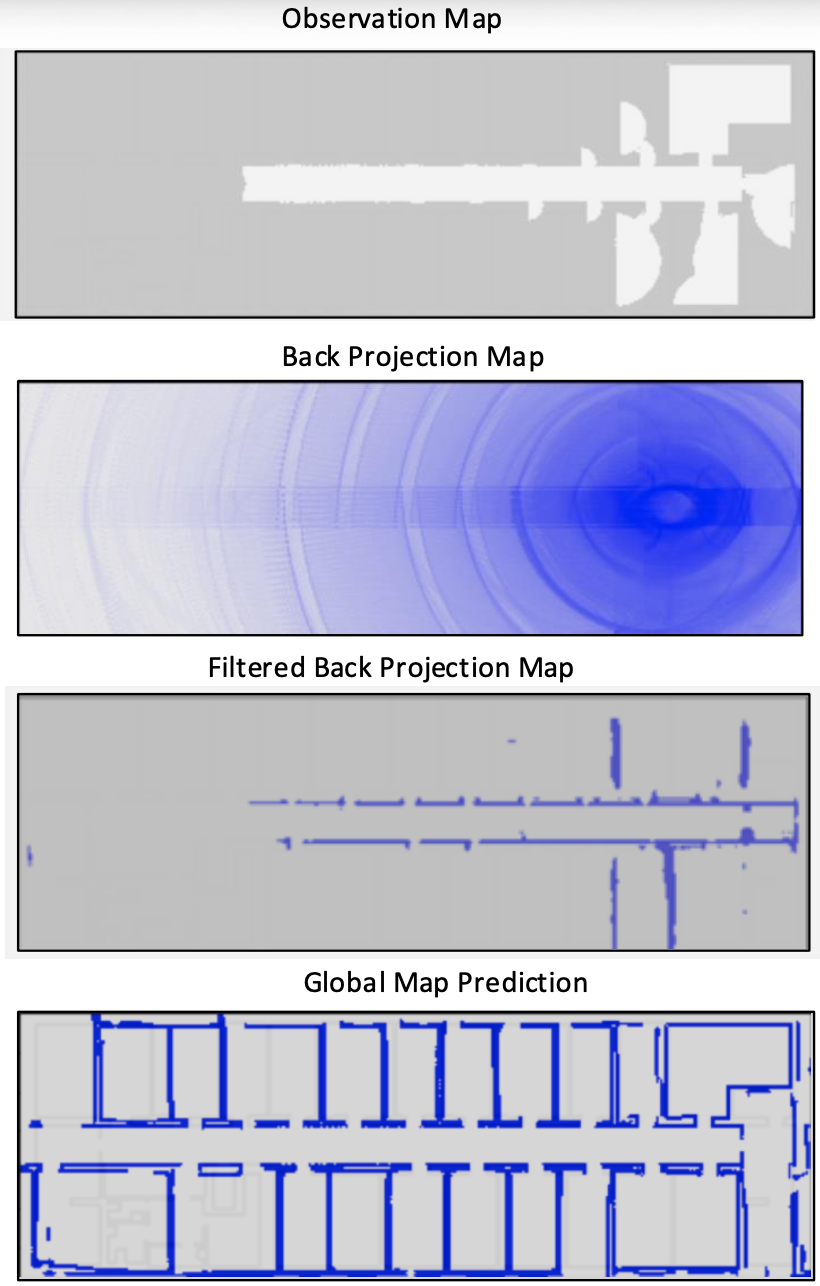
- Trained a GAN to reconstruct occluded geometry from noisy backprojection maps of NLOS data.
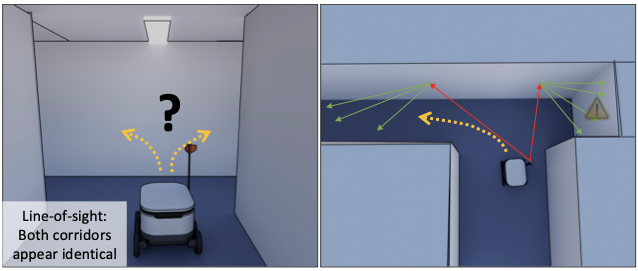
Both corridors appear identical in line of sight, but using NLOS, we can predict the dead end beforehand.
From a small observed map, NLOS lets us predict a much larger unseen map.
DARPA Triage Challenge
More Info
- Engineered UAV and 3 UGVs integrating LiDAR, radar, cameras for autonomous casualty assessment.
- Designed multi-agent coordination strategies and developed a hybrid path-planning algorithm.
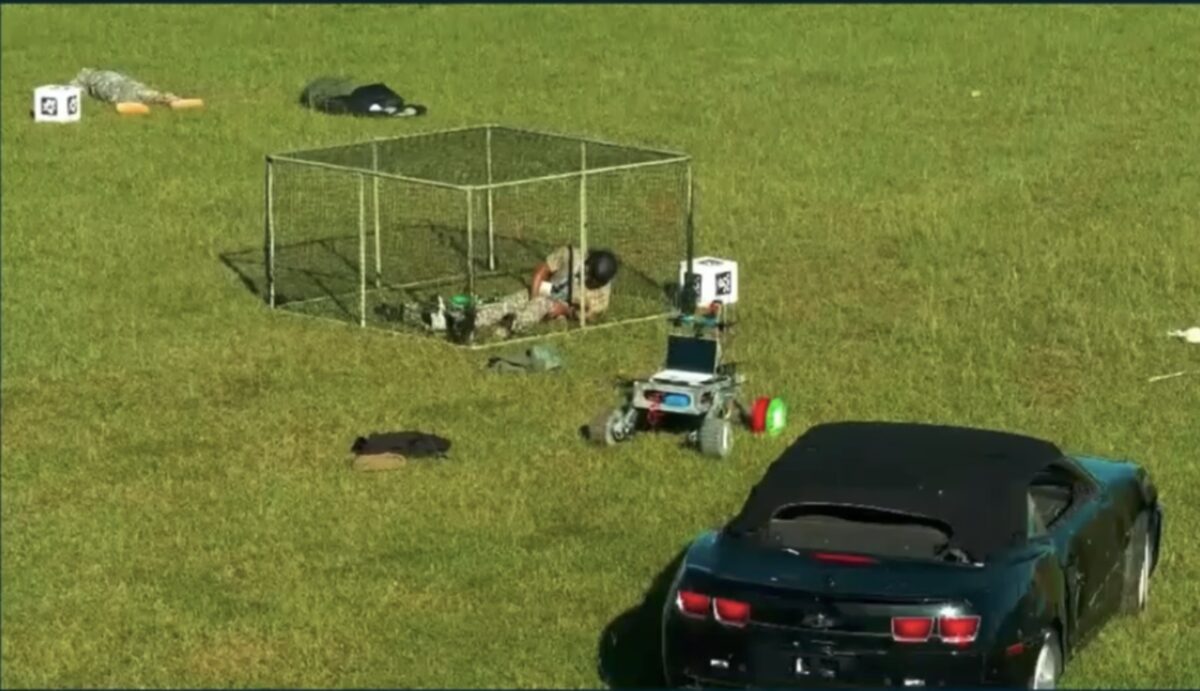
- Achieved autonomous assessment of real casualties using SLAM and deep learning from 1m standoff.

Our developed systems, an NDAA-compliant drone and UGV.


DARPA real-world trials - rover triaging in the setting to assess casualties.

Path planning - autonomous routing and coordination for casualty assessment.

ICUAS UAV Competition
More Info
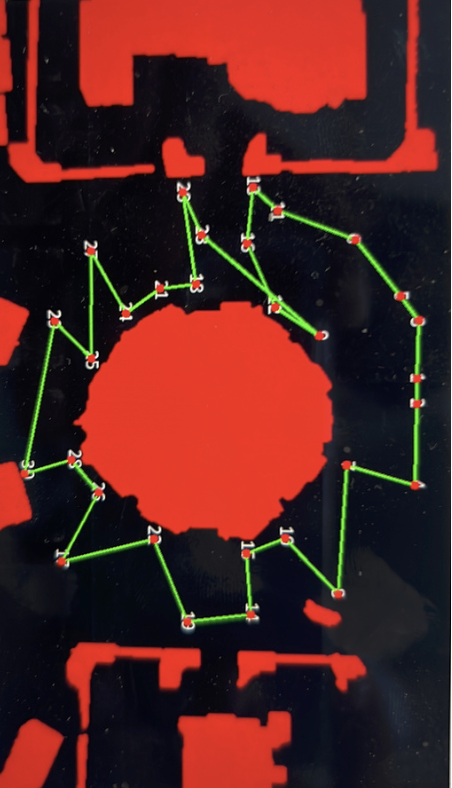
- Implemented LiDAR–camera fusion for fruit counting and mapping in ROS2 with hybrid A* TSP planner.
- Achieved 98% accuracy in simulation & 90% accuracy in real-world implementation.
- Stack: ROS2, Gazebo, LiDAR-camera fusion, mapping, path planning, and clustering.
- Sensors: Intel D455 and Velodyne VLP-16.

Our team
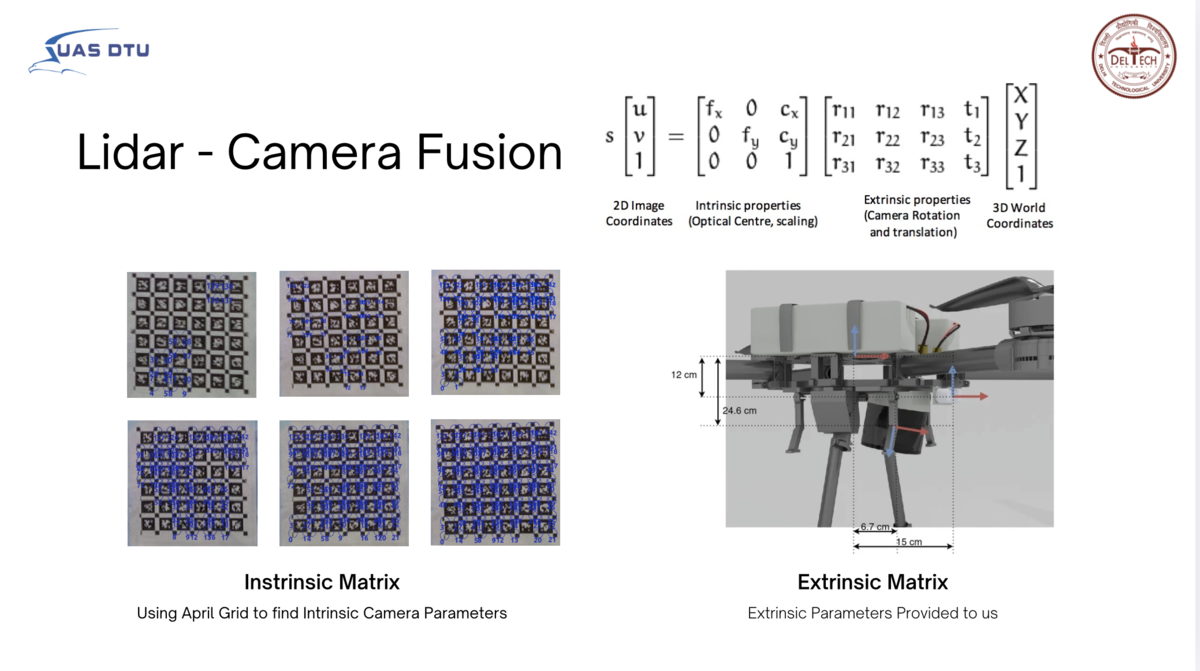
Camera-LiDAR fusion
Lidar Mapping
Fruit tracking and counting
Avionics Engineer, Team UAS-DTU
More Info
- Built autonomous UAV systems implementing SLAM, sensor fusion, RL and onboard control stacks.
- Executed 100+ hours of automated missions with Mission Planner and SITL-Gazebo workflows.
- Designed and fabricated quadcopters, VTOLs, fixed-wings, and rovers with comm systems.
- Developed ROS pipelines and deployed RealSense D455 for autonomous navigation and mapping.
Publications
SuperEx: Enhancing Indoor Mapping and Exploration using Non-Line-of-Sight Perception
Preprint, Under Review (2025)
More Info
- A framework for indoor mapping and exploration that uses non-line-of-sight sensing.
- Uses single-photon LiDAR to carve empty NLOS regions and reconstruct nlos region.
- Combines Pix2Pix and LaMa with global map prediction to improve frontier exploration.
- Reported a 12% gain in mapping accuracy under 30% coverage on simulated maps.
Projects
Physics-Informed Neural Networks for Singular Perturbation ProblemsPyTorch, PINNs, ODEs
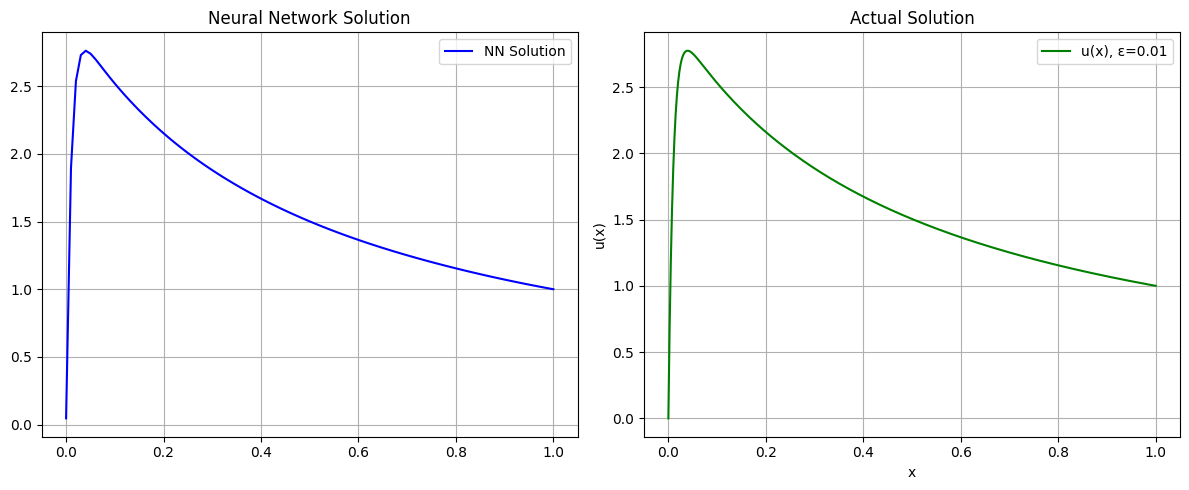
Physics-Informed Neural Networks for Singular Perturbation Problems
PyTorch, PINNs, ODEs
εu''(x) + (2x + 1)u'(x) + 2u(x) = 0, x ∈ [0,1]
with boundary conditions u(0) = 0 and u(1) = 1.
- Solved singularly perturbed ODEs using Chien PINNs, capturing stiff boundary layers.
Aerial Human Detection and Geo-localizationQuadcopter, PiCam, GPS, IMU, Python
Aerial Human Detection and Geo-localization
Quadcopter, PiCam, GPS, IMU, Python
- Implemented PiCam-based human detection with intrinsic–extrinsic calibration and IMU correction.
- Achieved cm-level geo-localization by fusing GPS, camera transforms, and UAV state estimates.
Drone On Time – Autonomous Drone Delivery SystemIncubated at DTU Innovation and Incubation Foundation
Drone On Time – Autonomous Drone Delivery System
Incubated at DTU Innovation and Incubation Foundation
- Built an autonomous medical drone delivery system achieving 75% cost and 70% emission reduction.
- Completed 25+ successful autonomous deliveries carrying upto 2 kg payloads over a 10 km range.
This video shows an autonomous payload drop from a UAV at 10 meters altitude.
Dynamic Multi-UAV Obstacle AvoidanceROS2, Gazebo, MAVROS, Ardupilot, Python
Dynamic Multi-UAV Obstacle Avoidance
ROS2, Gazebo, MAVROS, Ardupilot, Python
- Built a ROS2–Gazebo obstacle avoidance pipeline using Velodyne 360° LiDAR point clouds.
- Enabled 15 m/s collision-free flight via MAVROS–ArduPilot integration and dynamic avoidance.
- Stack: ROS2, Gazebo, MAVROS, and APFA.
This video demonstrates dynamic obstacle avoidance for a UAV in flight.
Skills & Platforms
Languages & Tools
Python, C/C++, MATLAB, PyTorch, NumPy, CUDA, Numba
Robotics & Embedded
ROS1/2, Gazebo, MuJoCo, ArduPilot, SITL, SLAM, Sensor Fusion, Camera Calibration
Hardware Stack
Jetson Nano/Orin, Raspberry Pi, LiDAR, mmWave Radar, RealSense D455, ESP32, Pixhawk
Aerial Platforms
Quadcopters, Fixed-Wing UAVs, VTOLs, Avionics, ArduPilot, SITL
Education
Delhi Technological University (DTU)
Aug 2023 - Present
Bachelor of Technology in Mathematics and Computer Science
Delhi, India
More Info
- Computer Science: Data Structures & Algorithms, Operating Systems, Computer Networks, Theory of Computation, Artificial Intelligence, Machine Learning.
- Mathematics: Linear Algebra, Modern Algebra, Differential Equations, Probability & Statistics, Stochastic Processes, Discrete Structures, Complex Analysis.
- Academics Head, Mathematics and Computing Community, DTU.
Modern School Barakhamba Road
April 2021 - June 2023
Senior Secondary Education (CBSE Class XII) : 94.4%
Delhi, India
More Info
- Vice President, Tech Society, Modern School Barakhamba Road.
Gallery